SeaCat is a vehicle of moderate size, which means that payload capabilities have to be adapted optimally to specific purposes. Specialised payload packages can be changed on demand (SwapHead). The system provides a wide range of capabilities.
Customised Applications
Finding the right solution for our customer’s requirements has always been one of ATLAS ELEKTRONIK’s outstanding strengths. SeaCat is part of permanent progress and constant optimisation to guarantee highest standards to our clients by minimising investments at the same time. Decades of experience in the field of unmanned systems made us an expert in optimising our AUVs.
- Hydrographic surveys according to highest standards
- Real-time data transmission for immediate point-of-interest inspection
- Providing a look into the inside of water supply ducts
- A high-frequency multi-beam echo sounder and a camera mounted on a rotary unit enable the mapping of vertical structures and ship hulls in great detail
- A highly sensitive magnetometer can be towed behind the AUV
- By delivering an acoustic view in the sediment, a high-quality subbottom profiler allows for archaeological, geological and military tasks
- Customised applications to meet specific requirements
Technical Overview
Dimensions
- Diameter 325mm
- Length approx. 2500 – 3500 mm depends on payload and battery options
- Width 576 mm
- Height 670 mm including antennas
Weight
- Weight in air approx. 130 – 220 kg depends on configuration
Speed
- Speed, max. > 6 kts
- Speed, min. 0 kts with hover capability
- Speed, reverse, max. 1 kts
Depth
- Water depth, operational range 2 m < depth < 600 m If water depth is less than 2 m, the AUV runs at the surface only.
Standard Payload
- Edgetech 2205 Side Scan Sonar
- Tritech Micron DST Scanning Sonar
Range / Endurance
- Range (AUV) approx. >20 nm with 3 kts speed through water without cable
- Range (ROV) ≤ 700 m with 1000 m fibre-optic cable
- Endurance (standard battery) ≤ 10 h at 3 kts speed through water depends on payload
- Endurance (additional battery) ≤ 20 h with 3 kts speed through water depends on payload
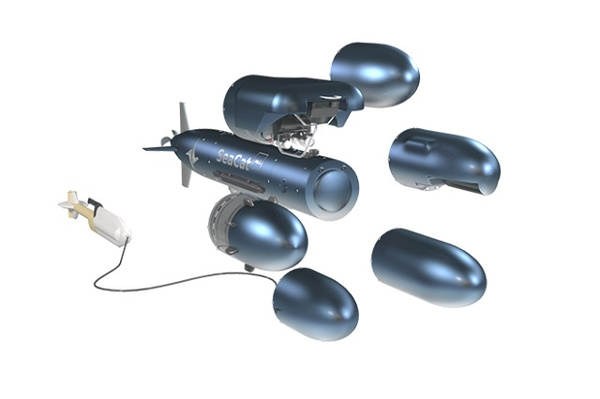
SwapHead Technology
Adaptivity
SeaCat can be supplemented by a multitude of user-defined payloads, located in the SeaCat’s flooded bow section. The SwapHead is exchangeable in the field within minutes and allows for optimised adaptation to the specific task. SeaCat + SwapHead permit a wide range of highly demanding missions that would otherwise require different types of vehicles.
Examples of SeaCat SwapHeads
- Survey Head ONE – R2 Sonic Multi-beam echo sounder for bottom topology mapping
- Survey Head Mk TWO – A NORBIT Wideband Multi-beam Sonar and video camera delivers bathymetric images paired with high resolution videos
- Survey Head Mk FOUR – A G882 Magnetometer as well as a Sub-bottom Profiler are featured in addition to the Norbit Wideband Multi-beam Sonar and video camera
- Inspection Head AUV – Video camera mounted on a pan-tilt frame and imaging sonar for inspection
- Water Quality Head – Systems for measuring water quality like dissolved oxygen, hydrocarbons, dissolved organic matter, turbidity, etc.
- Tunnel Inspection Head – Able to inspect autonomously fresh-water supply ducts over long distances
- Inspection Head ROV – Scanning predefined sections of underwater structures with a 3D video camera and a high-frequency multi-beam echo sounder on a rotating sensor suite
- Geomagnetic Head – Detecting and mapping all sizes of ferrous objects buried in the sediment
- Subbottom Head – A Tritech dual-frequency Seaking Parametric Subbottom Profiler enables an acoustic view into the sediment